| Prev | Next |
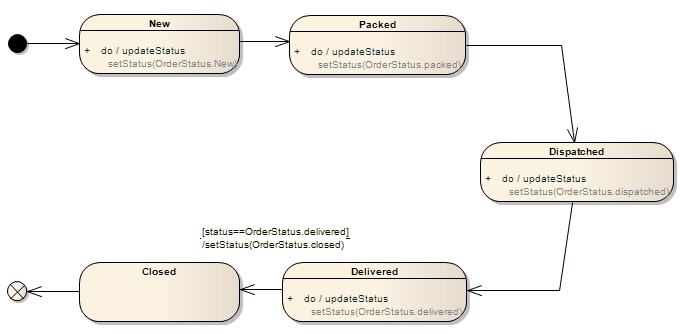
Java Code Generated From Legacy StateMachine Template
private enum StateType: int
{
ProcessOrder_Delivered,
ProcessOrder_Packed,
ProcessOrder_Closed,
ProcessOrder_Dispatched,
ProcessOrder_New,
ST_NOSTATE
}
private enum TransitionType: int
{
ProcessOrder_Delivered_to_ProcessOrder_Closed,
TT_NOTRANSITION
}
private enum CommandType
{
Do,
Entry,
Exit
}
private StateType currState;
private StateType nextState;
private TransitionType currTransition;
private boolean transcend;
private StateType ProcessOrder_history;
private void processOrder_Delivered(CommandType command)
{
switch(command)
{
case Do:
{
// Do Behaviors..
setStatus(Delivered);
// State's Transitions
if((status==Delivered))
{
nextState = StateType.ProcessOrder_Closed;
currTransition = TransitionType.ProcessOrder_Delivered_to_ProcessOrder_Closed;
}
break;
}
default:
{
break;
}
}
}
private void processOrder_Packed(CommandType command)
{
switch(command)
{
case Do:
{
// Do Behaviors..
setStatus(Packed);
// State's Transitions
nextState = StateType.ProcessOrder_Dispatched;
break;
}
default:
{
break;
}
}
}
private void processOrder_Closed(CommandType command)
{
switch(command)
{
case Do:
{
// Do Behaviors..
// State's Transitions
break;
}
default:
{
break;
}
}
}
private void processOrder_Dispatched(CommandType command)
{
switch(command)
{
case Do:
{
// Do Behaviors..
setStatus(Dispatched);
// State's Transitions
nextState = StateType.ProcessOrder_Delivered;
break;
}
default:
{
break;
}
}
}
private void processOrder_New(CommandType command)
{
switch(command)
{
case Do:
{
// Do Behaviors..
setStatus(new);
// State's Transitions
nextState = StateType.ProcessOrder_Packed;
break;
}
default:
{
break;
}
}
}
private void StatesProc(StateType currState, CommandType command)
{
switch(currState)
{
case ProcessOrder_Delivered:
{
processOrder_Delivered(command);
break;
}
case ProcessOrder_Packed:
{
processOrder_Packed(command);
break;
}
case ProcessOrder_Closed:
{
processOrder_Closed(command);
break;
}
case ProcessOrder_Dispatched:
{
processOrder_Dispatched(command);
break;
}
case ProcessOrder_New:
{
processOrder_New(command);
break;
}
default:
break;
}
}
private void TransitionsProc(TransitionType transition)
{
switch(transition)
{
case ProcessOrder_Delivered_to_ProcessOrder_Closed:
{
setStatus(closed);
break;
}
default:
break;
}
}
private void initalizeStateMachine()
{
currState = StateType.ProcessOrder_New;
nextState = StateType.ST_NOSTATE;
currTransition = TransitionType.TT_NOTRANSITION;
}
private void runStateMachine()
{
while (true)
{
if (currState == StateType.ST_NOSTATE)
{
break;
}
currTransition = TransitionType.TT_NOTRANSITION;
StatesProc(currState, CommandType.Do);
// then check if there is any valid transition assigned after the do behavior
if (nextState == StateType.ST_NOSTATE)
{
break;
}
if (currTransition != TransitionType.TT_NOTRANSITION)
{
TransitionsProc(currTransition);
}
if (currState != nextState)
{
StatesProc(currState, CommandType.Exit);
StatesProc(nextState, CommandType.Entry);
currState = nextState;
}
}
}

